
談到設計機器人,腦海中浮現的第一個畫面可能會是人型或是動物型態的機械。但如果研發的機器人主要的用途是用於探索海洋,尤其是深海等困難的環境,參考一些海洋生物的移動方式,可能會有很大的幫助。英格蘭布里斯托大學(University of Bristol)發表了一款實驗性的水下機器人,被取名為 RoboSalps,被認為將有機會對水下探索做出貢獻。

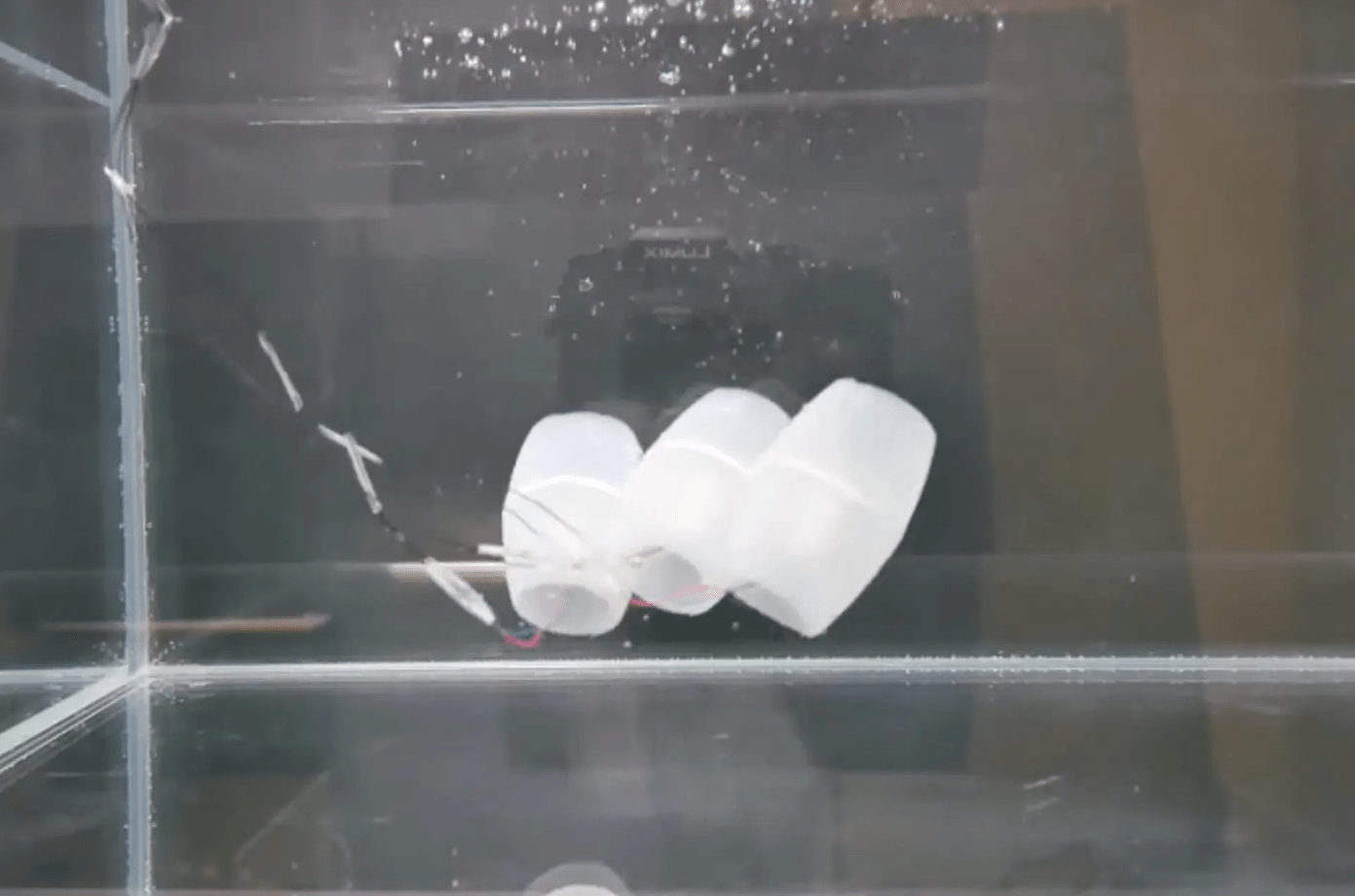
樽海鞘(Salp)中文又被稱為海樽,全身為透明狀的,主要以浮游生物為食,牠們的身體呈現為半透明的圓筒狀,可以透過泵水前後移動。更具特色的是,樽海鞘長到一定階段之後,會聚集再一起呈現環狀或者帶狀進行覓食。
樽海鞘的活動特性啟發了 RoboSalps 的主要設計。RoboSalps 由多個管狀的矽膠單元模組組成,每個單元內都有無線的電機與螺旋槳,透過吸入或吐出水產生反作用力噴射移動。每個單元僅能單向前進或後退,但是透過互相連結、組成多機器人的結構,RoboSalps 就可以有多組不同的推進方向,便於研究人員的遠端操控。

除此之外,RoboSalps 多單元的設計也使它更無須擔心探索未知世界的過程中,發生損壞的問題。因為每個單元都是彼此的冗餘,如果其中一個損壞,其他單元可以完全取代其功能。在調查海洋世界的過程中,RoboSalps可以全部組合在一起,等到目的地之後再依任務需求分開或是集結。
RoboSalps 多單元的設計,加上重量輕與堅固耐用,被認為有機會成為探索外星水下任務、檢查汙水下水道或是工業冷卻系統的好選擇。研究團隊也預備進一步參考樽海鞘的移動方式,設計出適合的控制模組,讓 RoboSalps 在進行活動時也能更精確節能。
參考資料:February: Marine robots | News and features | University of Bristol

加點製造為產品開發專業知識交流社群,專業問答提供開發者互助學習,也可以快速的搜尋在地的優秀設計與製造廠商。優秀產品資訊歡迎投稿。