
當跳躍的壁虎以頭或者前腳撲出碰到樹幹的時候,壁虎有種特殊的能耐,能夠掛在樹幹上,而不是被彈走或是掉到地上。科學家發現了怎樣的機制讓壁虎可以這樣作,並且在一個小機器人上運用了這樣的能力。
新研究是由加州柏克萊大學的 Robert Full 帶頭,集合了德國、英國與紐約的團隊進行。
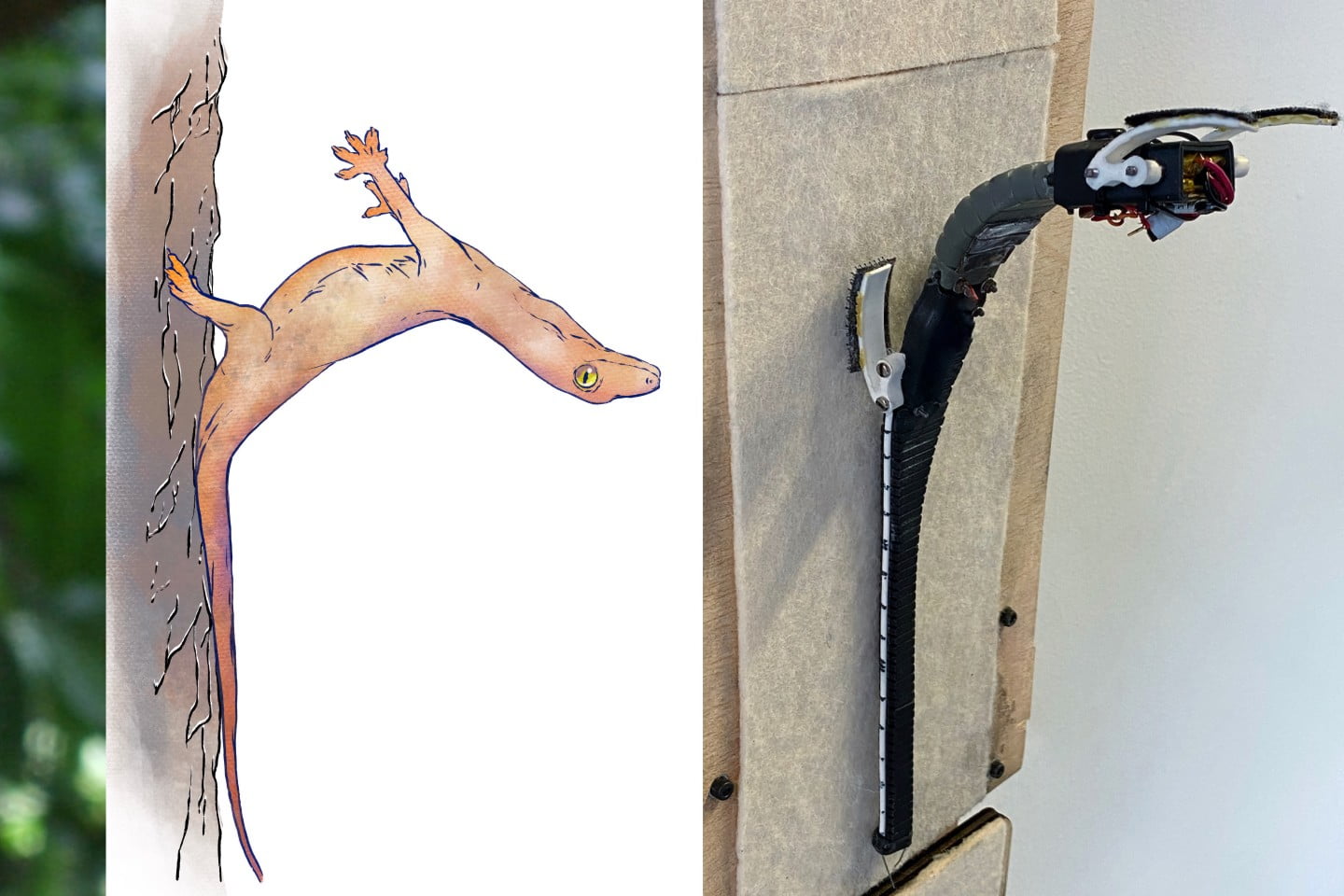
整個研究的起點,是研究人員在新加坡進行田野調查的時候,發現到許多壁虎會藉由跳躍/滑翔到別的樹幹。雖然牠們會試圖避免以頭部先著陸,但這個情況時常發生,而如果真的發生時,牠們的前進的速度相當快,大約會是每秒6公尺。而當牠們的頭、肩膀或前腳從樹上回彈的時候,壁虎有種特殊的機制,可以用後腳和尾巴抓住樹幹。牠們的長尾巴壓在樹幹上,以後腿作為支點,這樣的槓桿作用讓壁虎免於整個後翻掉到地上。

科學家以3D列印機器人,重現這樣的機制。這個小機器人除了有四條腿覆蓋滿魔鬼氈、還有一條長尾巴和內建的自動肌腱,在前腳與硬表面接觸的時候,就會觸發肌腱、下壓尾巴。
有這個設計的小機器人,被發射到一面覆蓋了毛氈的牆面時,可以有 55% 的機率成功「上牆」而不會後翻往下掉、而是黏住牆面。雖然聽起來不是太高,但沒有尾巴的機器人其成功率會掉到只剩 15%。這與在野生壁虎身上的觀察結果一致──有尾巴的壁虎有將近 87%的上牆成功率,但因為逃避捕食者等因素失去尾巴的壁虎,則幾乎都會落到地上。

科學家希望藉由機器人模擬壁虎,可以測量觀察野外的壁虎無法得知的數據。目前的資料顯示,長尾巴是壁虎可以成功落到另一個樹幹的重要成分,而對於這個行為的理解,可以有助於未來應用於其他領域,還可以透過改變尾巴的組成與角度,未來更進一步細緻的控制機器人的動作。
資料來源:University of California-Berkeley
延伸閱讀:像海洋生物一樣靈活!西北大學開發微型機器人
香港城大開發「神奇」磁性噴霧 M-spray 可將物體變為微型機器人
加點製造為產品開發專業知識交流社群,提供專業問答提供開發者互助學習,也可以搜尋在地的優秀設計與製造廠商。